最近在学习Ray Tracing in One Week,虽然名字有点标题党,但确实是一本不可多得的好书(毕竟众多大佬推荐)。虽然关于这本书的学习资料已经有很多了,不过反正是学习笔记(翻译和一点补充),整理在自己博客里做一个记录吧。
第一本总共有13章(加概论),全放在一篇博客里看着太累,大概分成一篇两章的样子发布。
OK,开始。
Chapter 0:概论
作者简介,成书背景等等。
Chapter 1:输出第一张图片
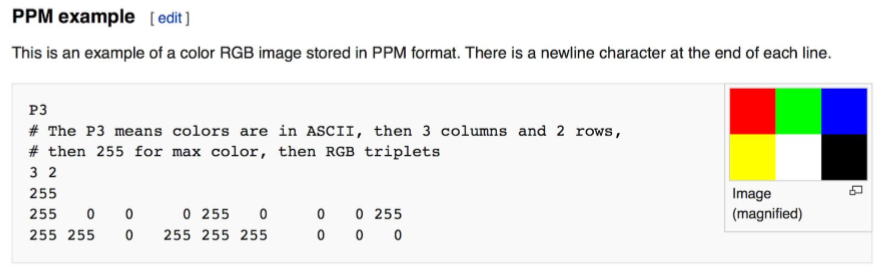
当你开始渲染器的时候,你需要一个看见图片的方式。最直接的方式就是写进文件。关键在于(图片文件)有那么多种格式,而其中大部分都很复杂。我常用的是纯文本的ppm格式。下面Wiki的解释挺不错的:
我们写点C++代码来输出些东西:
int main()
{
int nx = 200;
int ny = 100;
std::cout << "P3\n" << nx << " " << ny << "\n255\n";
for (int i = ny - 1; i >= 0; i--)
{
for (int j = 0; j < nx; j++)
{
float r = float(j) / float(nx);
float g = float(i) / float(ny);
float b = 0.2;
int ir = int(255.99*r);
int ig = int(255.99*g);
int ib = int(255.99*b);
std::cout << ir << " " << ig << " " << ib << "\n";
}
}
return 0;
}
代码中的几个点说明一下:
- 每一行的像素从左到右输出
- 各行从上到下输出
- 照惯例每一个R/G/B部分的取值范围在0.0-1.0之间。我们可能会在内部使用高动态范围(译注:比如0-255),但是在输出之前我们还是会把他映射到0-1的范围,所以代码不会改变。
- 从左到右由黑变红,从下到上由黑变绿。红色和绿色融合成黄色,所以我们可以想见右上角是黄色的。
输出图像文件
打开输出的文件,我们可以看见:(在我的mac上使用ToyViewer打开的,你也可以用你喜欢的浏览器,如果不支持,你可以google“ppm浏览器”)

哦耶,这就是图形学版的“Hello World”。如果你的图片看起来不是这样的,用文本编辑器打开输出的文件看看,应该是像下面这样的:
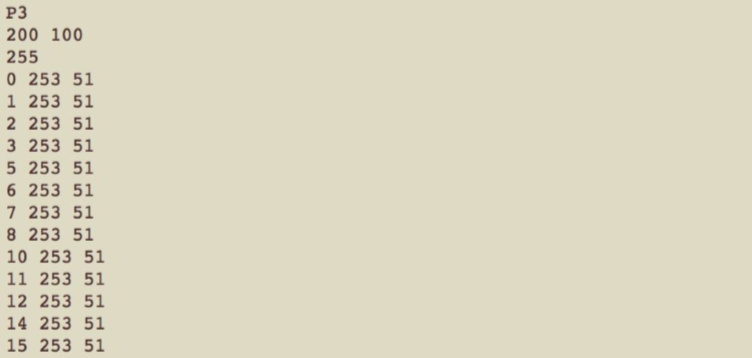
如果不是,你可能加了一些行或者啥的迷惑了图片浏览器。
如果你想试试除了PPM更多的格式,试试Github上的stb_image.h,我挺喜欢的。
自注:
试了一下作者的代码,发现不能输出到文件,可以看到终端中的输出和预想差不多。。。但是说好的输出成ppm文件呢???
于是在网上找到了一篇文章,修改了一下代码:
https://blog.csdn.net/libing_zeng/article/details/54412618
#include "stdafx.h"
#include <iostream>
#include <fstream> // 添加 输出到文件的库
#include "vec3.h"
using namespace std;
int main()
{
ofstream outfile("chapter1_output.ppm", ios_base::out); // 输出地址
int nx = 200;
int ny = 100;
outfile << "P3\n" << nx << " " << ny << "\n255\n"; // 输出
<…>
}
Chapter 2:vec3类
几乎所有的图形程序都会使用一些类来存储几何向量和颜色。在许多系统中这些向量是4D的(几何的3D加上齐次坐标,颜色的话RGB的加上透明通道)。对于我们来说,3个坐标就够了,所以我们用vec3来存储颜色,位置,方向,偏移等几乎所有的东西。也许有些人不喜欢这样,因为这不会阻止你做一些蠢事,像在位置坐标加上颜色。这很有道理,但我们这里采取“最少代码”原则,只要不是错的太离谱。
下面是vec3类的第一部分:
#ifndef VEC3H
#define VEC3H
#include <math.h>
#include <stdlib.h>
#include <iostream>
class vec3 {
public:
vec3() {}
vec3(float e0, float e1, float e2) { e[0] = e0; e[1] = e1; e[3] = e2; }
inline float x() const { return e[0]; }
inline float y() const { return e[1]; }
inline float z() const { return e[2]; }
inline float r() const { return e[0]; }
inline float g() const { return e[1]; }
inline float b() const { return e[2]; }
inline const vec3& operator+() const { return *this; }
inline vec3 operator-() const { return vec3(-e[0], -e[1], -e[2]); }
inline float operator[](int i) const { return e[i]; }
inline float& operator[](int i) { return e[i]; };
inline vec3& operator+=(const vec3 &v2);
inline vec3& operator-=(const vec3 &v2);
inline vec3& operator*=(const vec3 &v2);
inline vec3& operator/=(const vec3 &v2);
inline vec3& operator*=(const float t);
inline vec3& operator/=(const float t);
inline float length() const { return sqrt(e[0] * e[0] + e[1] * e[1] + e[2] * e[2]); }
inline float squared_length() const { return e[0] * e[0] + e[1] * e[1] + e[2] * e[2]; }
inline void make_unit_vector();
float e[3];
};
#endif // ! VEC3H
向量运算
我在这用了float类型,不过在其他的光线追踪器中也用double类型。并不存在正确与否——顺从你自己的品味就行。这些都是写在头文件中,接下来我们要写一些向量运算:
inline vec3 operator+(const vec3 &v1, const vec3 &v2)
{
return vec3(v1.e[0] + v2.e[0], v1.e[1] + v2.e[1], v1.e[2] + v2.e[2]);
}
inline vec3 operator-(const vec3 &v1, const vec3 &v2)
{
return vec3(v1.e[0] - v2.e[0], v1.e[1] - v2.e[1], v1.e[2] - v2.e[2]);
}
inline vec3 operator*(const vec3 &v1, const vec3 &v2)
{
return vec3(v1.e[0] * v2.e[0], v1.e[1] * v2.e[1], v1.e[2] * v2.e[2]);
}
inline vec3 operator/(const vec3 &v1, const vec3 &v2)
{
return vec3(v1.e[0] / v2.e[0], v1.e[1] / v2.e[1], v1.e[2] / v2.e[2]);
}
几何运算
/和*运算符是给颜色计算时使用的,你不太会想用在类似于坐标的运算中。同样,我们也有一些为几何准备的运算符:
inline float dot(const vec3 &v1, const vec3 &v2)
{
return v1.e[0] * v2.e[0] + v1.e[1] * v2.e[1] + v1.e[2] * v2.e[2];
}
inline vec3 cross(const vec3 &v1, const vec3 &v2)
{
return vec3((v1.e[1] * v2.e[2] - v1.e[2] * v2.e[1]),
-(v1.e[0] * v2.e[2] - v1.e[2] * v2.e[0]),
(v1.e[0] * v2.e[1] - v1.e[1] * v2.e[0]));
}
计算单位向量
还有计算出和输入向量方向一致的单位向量:
// 似乎原文没有添加向量和浮点数的乘除法计算,计算单位向量时会报错
inline vec3 operator*(float t, const vec3 &v)
{
return vec3(t*v.e[0], t*v.e[1], t*v.e[2]);
}
inline vec3 operator/(vec3 v, float t)
{
return vec3(v.e[0] / t, v.e[1] / t, v.e[2] / t);
}
inline vec3 unit_vector(vec3 v)
{
return v / v.length();
}
使用运算方法
现在我们可以改改main中的代码,使用我们刚写的vec3类:
#include "stdafx.h"
#include <iostream>
#include "vec3.h"
int main()
{
int nx = 200;
int ny = 100;
std::cout << "P3\n" << nx << " " << ny << "\n255\n";
for (int i = ny - 1; i >= 0; i--)
{
for (int j = 0; j < nx; j++)
{
// chapter 2
vec3 col(float(i) / float(nx), float(j) / float(ny), 0.2);
int ir = int(255.99 * col[0]);
int ig = int(255.99 * col[1]);
int ib = int(255.99 * col[2]);
std::cout << ir << " " << ig << " " << ib << "\n";
}
}
return 0;
}
自注:
Vec3类的文件要放在哪个文件里,也是一个问题, 根据参考博客,类的定义都放在头文件中:
| – | 非模板类型(none-template) | 模板类型(template) |
|---|---|---|
| 头文件(.h) | 全局变量申明(带extern限定符)全局函数的申明 带inline限定符的全局函数的定义 |
带inline限定符的全局模板函数的申明和定义 |
| – | 类的定义 类函数成员和数据成员的申明(在类内部) 类定义内的函数定义(相当于 inline)带 static const限定符的数据成员在类内部的初始化带 inline限定符的类定义外的函数定义 |
模板类的定义 模板类成员的申明和定义(定义可以放在类内或者类外,类外不需要写 inline) |
| 实现文件(.cpp) | 全局变量的定义(及初始化) 全局函数的定义 |
(无) |
| – | 类函数成员的定义 类带 static限定符的数据成员的初始化 |
未完待续。